マイスティアは、ルネサスエレクトロニクス社のマイクロコンピュータに精通し、プリファードパートナーとして付加価値の高いソリューションをお客様に提供しています。
HRMODもルネサスエレクトロニクス社とのパートナーシップから構想がスタート。ミネベアミツミ社との3社連携によって両社の製品性能を最大限に引き出すソリューションを開発、お客様に、新たな価値をお届けします。
トルク性能
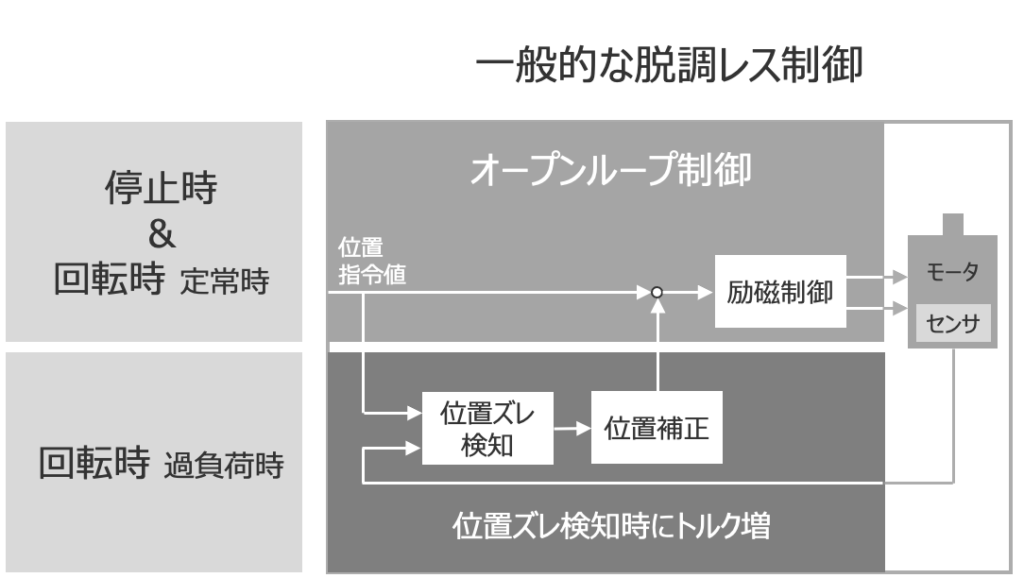
脱調マージンは必要(脱調マージン低減は可能)
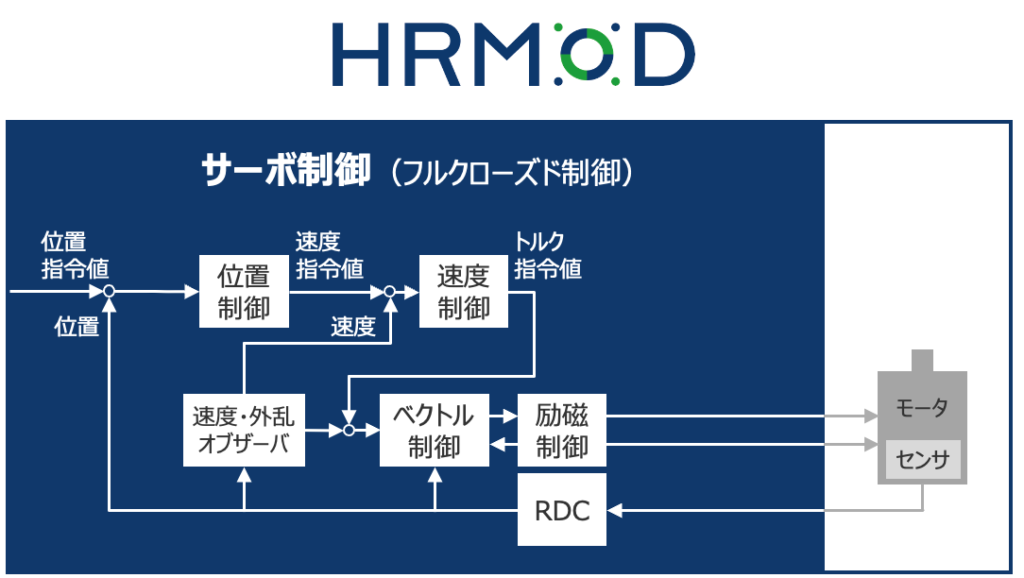
脱調マージンは不要モータのトルク性能を最大限活用モータ小型化可能
応答性能
位置ズレ検知しか行っていないため整定が遅い
高加減速レートで運転可能 位置・速度フィードバックにより 整定が速い
位置精度
負荷トルクの影響で位置ズレ発生
高分解能20万P/R 位置フィードバックにより負荷トルクの影響を受けずに高精度
発熱・消費電流
運転時・停止時ともに常に電流を消費し発熱
運転時・停止時ともに必要最小限の電流で駆動
振動
マイクロステップで振動低減は可能
位置・速度フィードバックに加えオブザーバ・フィルタ機能で振動を最小限に抑制
耐環境性(熱・埃・油・振動)
モータに電子部品が存在するので悪環境での使用が困難
モータは構造がシンプルなため悪環境で使用可能
部品点数
用途によっては減速機・冷却対策振動対策の部品が必要
減速機レス化が可能冷却対策振動対策の簡素化が可能