トルクを維持しながら20万分解能で高精度な位置制御が可能
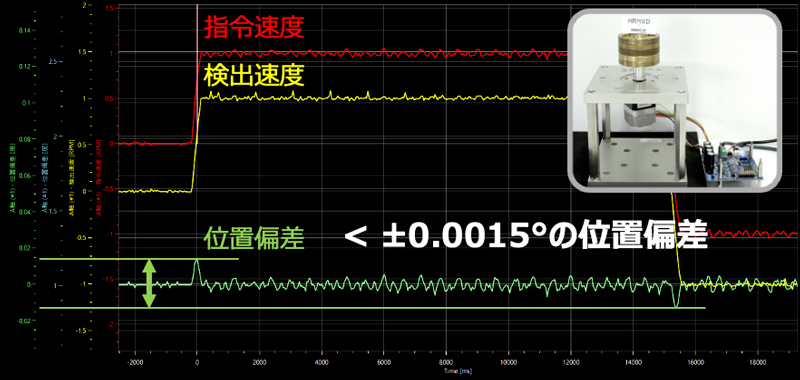
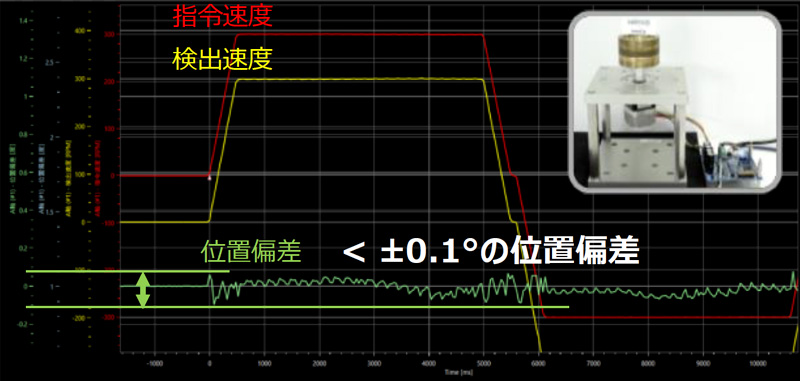
「低速」でも 「高速」 でも位置偏差を最小に抑え、なめらかな運転が可能。
レゾルバの高分解能位置検出によるサーボ制御で、「ゆっくり」でも「高速」でも位置偏差を最小化し、安定した運転が可能となり、振動対策部品が不要です。
ゆっくり安定駆動:1rpm
(約1kgの負荷を減速機なしで直接駆動)
高速でも安定駆動:300rpm
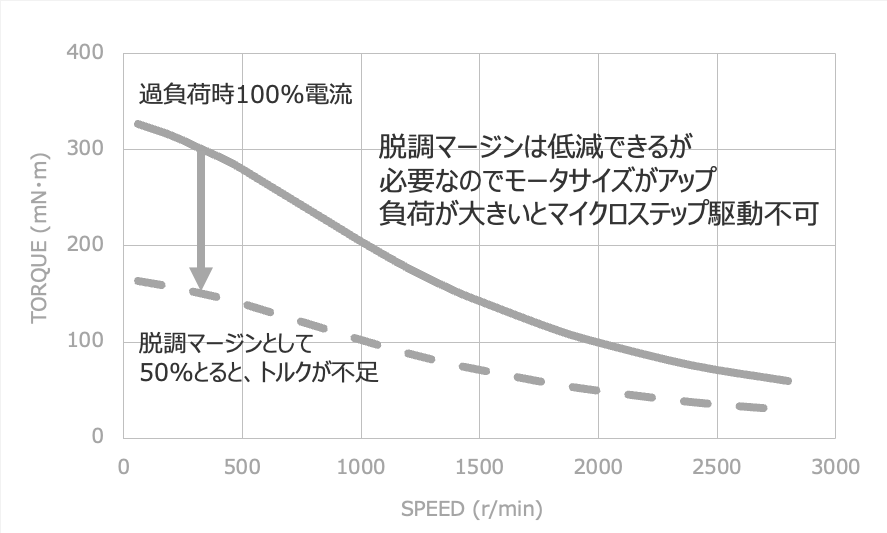
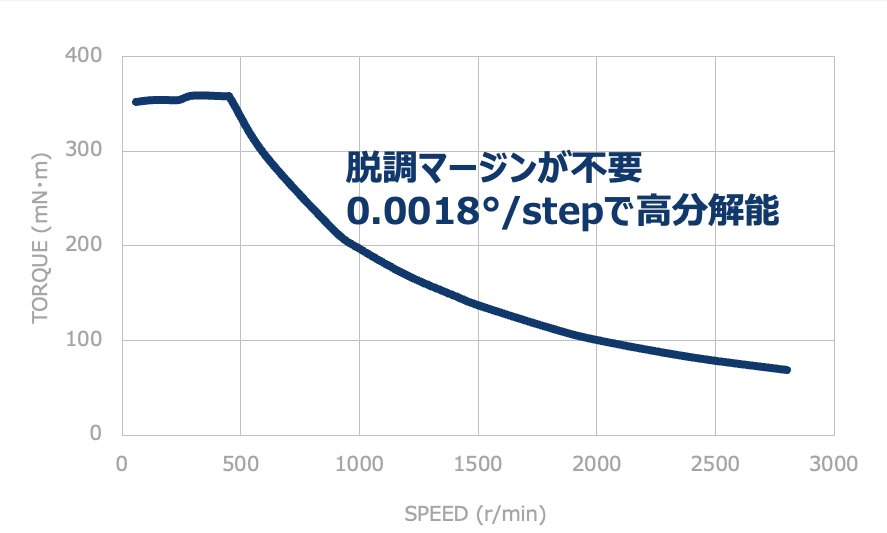
脱調マージン不要でモータサイズを約30%小型化可能
負荷が大きくても高精度・高分解能な運転。脱調マージンが不要でモータサイズの小型化が可能。
脱調マージンが必要な一般的な脱調レス制御と比較し、 20万P/Rの高分解能でありながらモータのトルク性能を最大限活用できるので小型のモータを使用することが可能です。
一般的な脱調レス制御(ハイブリッド)
(レゾルバ付きステッピングモータ)
□42mm 最大トルク 約330mNmのモータで比較
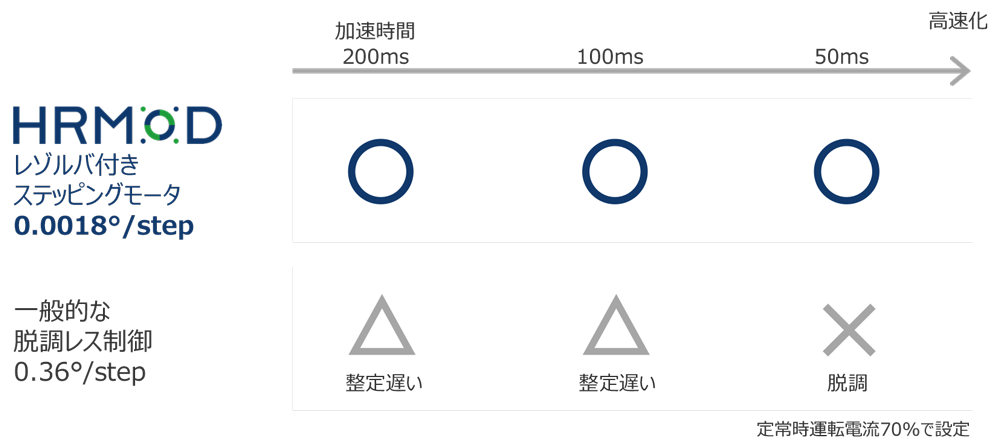
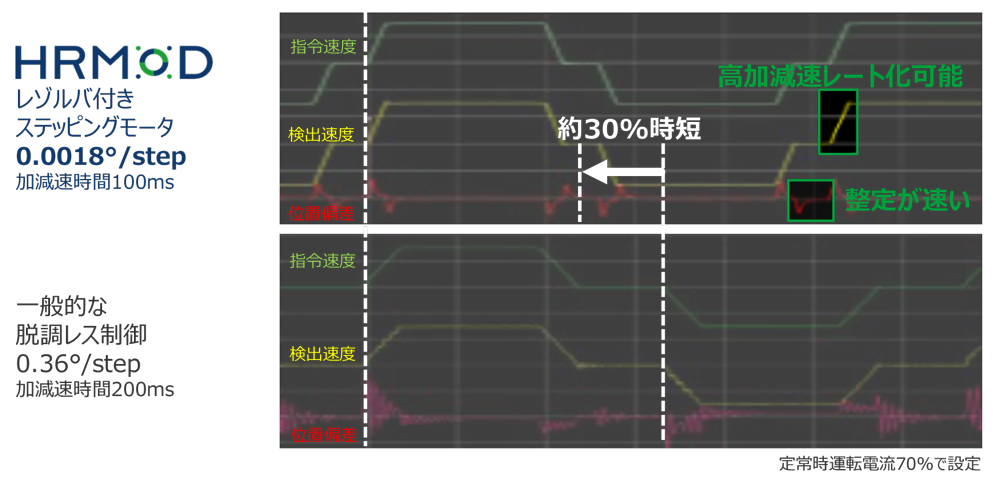
指令への高い追従性と加減速制御でタクトタイムを最大30%短縮可能
高分解能かつ高加減速レートでの位置決めが可能。「素早く」 と 「正確に」 を両立できタクトタイムを大幅に短縮することが可能。
一般的な脱調レス制御と比較し、高精度な位置・速度フィードバックによる 高速なサーボ制御で指令値・負荷に応じて駆動することで、高加減速レートでも脱調せずに運転することができ、タクトタイムの短縮が可能です。
加減速時間の影響
最大トルク約330mNmのモータで速度300rpm運転時(負荷:約1kgの真鍮イナーシャ)
タクトタイムへの影響
最大トルク約330mNmのモータで速度300rpmで1800°回転時(負荷:約1kgの真鍮イナーシャ)
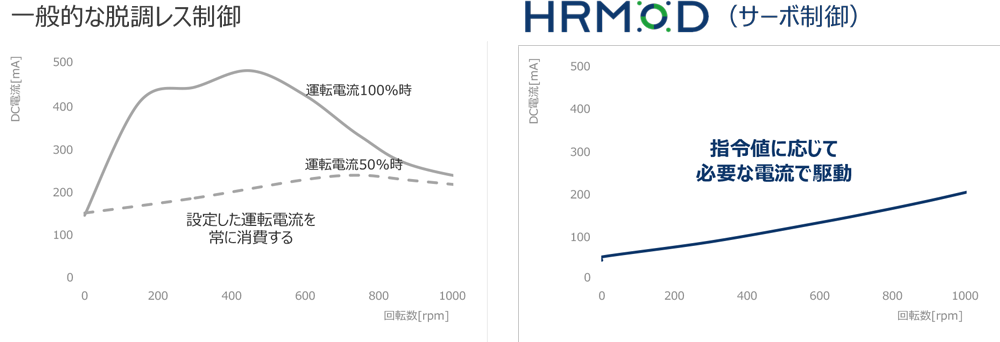
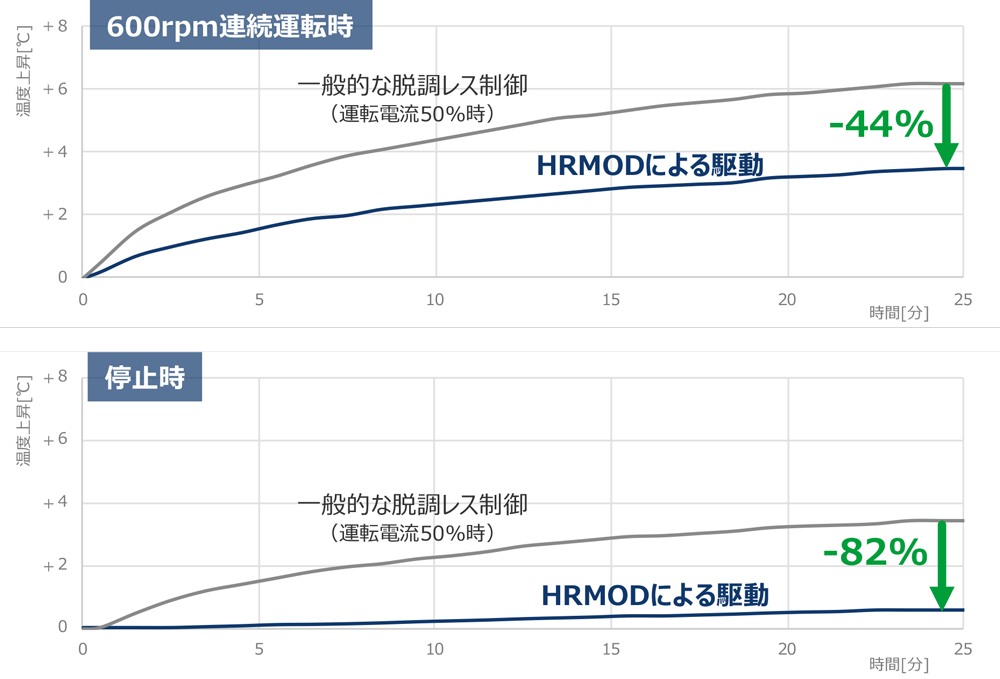
負荷に応じた制御で低発熱低振動での運転が可能
運転・停止時それぞれ必要な電流しか消費せずモータの温度上昇を最小限に抑制。熱対策が不要となり、対策部品コスト低減・電力コスト低減が可能。
サーボ制御により、指令値・負荷に応じて必要な電流でモータを駆動します。設定した運転電流を常に消費する一般的な脱調レス制御に比べ、消費電流を低減することが可能です。
運転電流比較
モータ温度上昇
バッテリーレスで絶対位置を保持できるアブソ・エミュレーション機能を搭載
位置情報を不揮発性メモリに保持できるので、電源遮断が発生する場合でも、電源復帰後にその位置から継続運転が可能。
マイコン内蔵の不揮発性メモリに位置情報を保存することで、電源が遮断されても位置情報を保持し続けることができ、バッテリーレスアブソリュートセンサと同等の機能を実現できます。
原点復帰運転を省略可
電源が遮断されても位置情報を保持できるので、電源復帰時の原点復帰運転は省略可
原点センサを省略可
押し当て方式を用いれば原点センサは省略可原点位置はHRMODの不揮発性メモリに保持
リミットセンサを省略可
不揮発性メモリに保持した原点位置を基準に動作可能な範囲を絶対位置で管理することが可能
高精度な原点復帰が可能
最小0.0018°単位で原点設定できるので、PTPでの高速かつ高精度な原点復帰が可能
制約事項:電源遮断中にモータを外力で動かした場合は、再度原点位置設定が必要